



Mana Pulse 2 Wāhanga Katia Loop Stepper Drive T86


Whakataki Hua



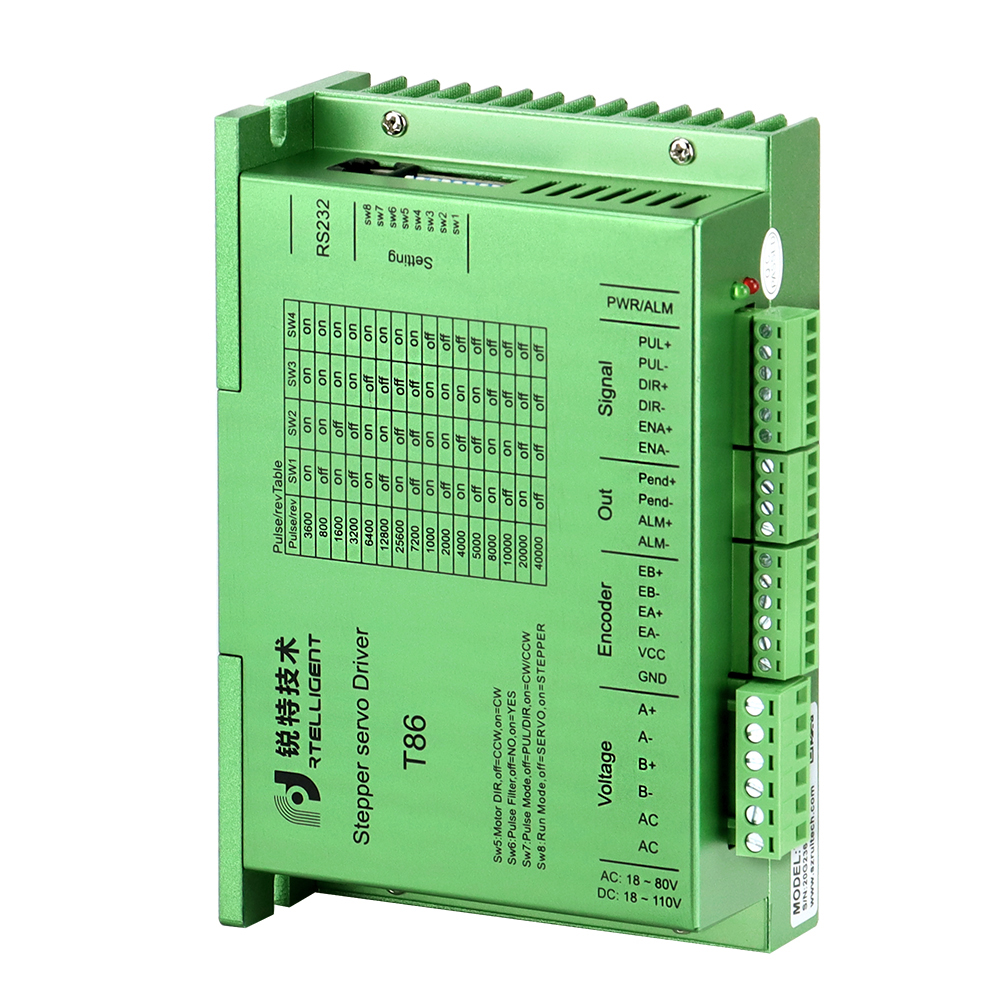
Hononga

Ngā āhuatanga
| Tuku hiko | 18-80VAC / 18–110VDC |
| Whakahaere tika | 4000 Pure/r |
| Aratau puhoi | Te ahunga me te pupuhi, te CW/CCW te pupuhi rua |
| Mana whakahaere o naianei | Servo vector mana algorithm |
| Tautuhinga moroiti-taahiraa | Tautuhinga whakahuri DIP, te whakatakotoranga rorohiko patuiro ranei |
| Awhe tere | Tikanga 1200 ~ 1500rpm, ki runga ki te 4000rpm |
| Te whakakore i te resonance | Tātai aunoatia te ira ohooho me te aukati i te wiri IF |
| Te whakatikatika tawhā PID | Te rorohiko whakamatautau hei whakatika i nga ahuatanga PID motini |
| Tātari pūtui | 2MHz tātari tohu mamati |
| Putanga whakaoho | Putanga whakaoho o te over-current, over-voltage, position error, etc |
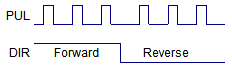
Aratau Pulse
Ko te atanga tohu taraiwa raupapa T paerewa kei roto i te ahua o te pupuhi, a ka taea e T86 te whiwhi i nga momo tohu whakahau e rua.
| Te pupuhi me te ahunga (PUL + DIR) |
|
| Taurua patere (CW +CCW) | 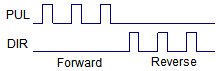 |
Tautuhinga moroiti-taahiraa
| Pulse/rev | SW1 | SW2 | SW3 | SW4 | Nga korero |
| 3600 | on | on | on | on | Ka hurihia te huringa DIP ki te ahua "3600" ka taea e te rorohiko whakamatautau te whakarereke noa i etahi atu waahanga. |
| 800 | atu | on | on | on | |
| 1600 | on | atu | on | on | |
| 3200 | atu | atu | on | on | |
| 6400 | on | on | atu | on | |
| 12800 | atu | on | atu | on | |
| 25600 | on | atu | atu | on | |
| 7200 | atu | atu | atu | on | |
| 1000 | on | on | on | atu | |
| 2000 | atu | on | on | atu | |
| 4000 | on | atu | on | atu | |
| 5000 | atu | atu | on | atu | |
| 8000 | on | on | atu | atu | |
| 10000 | atu | on | atu | atu | |
| 20000 | on | atu | atu | atu | |
| 40000 | atu | atu | atu | atu |
Whakaahuatanga Hua
Te whakauru i te atekōkiri stepper katinga-rua-waa-waa tino matatau, he hua hurihuri e whakakotahi ana i te hangarau tapahi-mata me te mahi tino pai me te pono. Ko tenei taraiwa takahanga hikoi i hangaia hei whakarereke i te huarahi e whakahaerea ai nga motuka tika, kia pai ai te pai me te tika mo nga momo tono.
Ko tetahi o nga ahuatanga matua o tenei taraiwa hikoi pai ko tana punaha kati-koropiko, e whakarite tika ana te whakahaere me te whakakore i nga mate o te hikoi, ahakoa i raro i nga tikanga whakahaere. Ma tana tikanga whakahaere o te pupuhi, ka whakamanahia e te puku te tuunga tika, te mahi maeneene me te whakaheke i te wiri, ka pai te mahi me te pumau.
Ko te taraiwa hiko-a-rua-waa-rua e whakahaeretia ana e te putere he hoahoa totika, kiato hoki, me te whakauru i te hangarau microprocessor hou. Ma tenei ka taea e ia te whakatutuki i te whakaputanga taipana teitei ake me te hapai i nga kawenga taumaha, he pai mo te miihini ahumahi, robotics, taputapu miihini CNC me etahi atu tono tino tika. Ko tana huringa motika motika taumira teitei e whakarite ana i te whakahaere nekehanga tika, na te mea he whiringa pai mo nga mahi e hiahia ana mo te nekehanga uaua.
Ko te puku he mea whakaraerae ki te whakahaere-whaiaro mohio ka kitea aunoa me te whakatika i nga hapa me nga rereke. Ma tenei ka whakarite kia rite tonu te mahi me te whakaiti i te hiahia mo te whakatikatika a-ringa, te whakatikatika ranei, ka penapena te wa me te whakapau kaha o nga kaiwhakamahi.
I tua atu, ko nga puku hiko-rua-waa-rua e whakahaeretia ana e te puia he tino pai, he hototahi hoki ki nga momo momo motuka, tae atu ki nga motuka hikoi bipolar me te unipolar. Ko tana atanga honohono ngawari me te paewhiri mana-kaiwhakamahi he ngawari ki te whakauru me te mahi pai ki nga punaha o mua, ka whakaiti i te waa whakauru me te uaua.
Hei whakarāpopototanga, ko te Pulse Controlled Two-Phase Closed Loop Stepper Driver he hua huri keemu e whakakotahi ana i te auahatanga, te tika me te pono ki tetahi taputapu kaha. Ko ona ahuatanga ahurei penei i te mana kati-koropiko, nga tikanga whakahaere o te pupuhi, te mana whakahaere whaiaro me te whai kiko, he pai mo nga tono e hiahia ana kia tino tika me te whai hua. Ka wheako i te heke mai o te mana motuka stepper me te iriti i nga taumata hou o te mahi me te hua me tenei hua motuhake.
-
 Whakatikaina Rtelligent T86 Manual Kaiwhakamahi
Whakatikaina Rtelligent T86 Manual Kaiwhakamahi